
随着robotaxi破圈走红,无人驾驶受到了越来越多的关注,无人驾驶技术发展及其商业化能力更是成为业界关注的焦点话题。近年来,在产品技术与政策法规的双重驱动下,特定场景无人驾驶的商业落地进程发展迅猛,悄然超越robotaxi先一步驶上快车道。
作为无人驾驶商业化领先企业,仙途智能在感知、规控、定位等领域快速构建起技术壁垒,同时快速实现技术迭代,自研多模态大模型赋能远程运营,为无人驾驶技术产品化和商业化筑牢了强大的技术基石。
更多挑战、更高难度,无人驾驶有自己的技术难题
不论是robotaxi、干线物流,亦或是港口、矿山,在每个垂直场景里,无人驾驶都需要解决该场景内的长尾问题。例如,环卫清扫车行驶在城市公开道路上,除了要识别车辆、行人、信号灯等常规识别内容,还要识别地面的垃圾、路边的树枝、水管、石块、坑洞等,这大大增加了自动驾驶感知的corner case数量。
仙途智能自主研发了业内领先的兼具多任务、多模态、跨时序等特点的BEV多任务感知模块,在常规的交通流以外,还新增了特有的垃圾检测、低矮障碍物检测任务,大大增强了环卫场景下长尾问题的处理能力。BEV感知模块以环视图像、点云为输入,通过多级计算结构共享交互,一套深度网络模型同时提供五个感知任务预测,包括3D检测、语义分割、低矮障碍物检测、垃圾检测等,计算负担降低30%以上,且拥有更好的感知表现。跨多模态、跨多传感器的信息聚合能力则补齐了单模态感知的短板,感知精度较纯视觉算法提升32.6%以上,同时具备可拓展性,能进一步接入更多传感器数据。BEV感知算法还具备多帧点云输入、多帧特征聚合两个层级的跨时序感知能力,相比单帧信息感知精度可提升16.6%以上,具备更精确的目标运动速度预测能力,平均速度误差可控制在0.29m/s以内。

仙途智能BEV感知在繁忙路口的3D检测综合能力,对狭窄道路上众多擦肩而过的交通参与者稳定检出及动态预测
贴边清扫对无人驾驶提出了更高的定位精度需求。基于高精地图和现场实时定位,仙途智能实现厘米级定位,误差2cm以内。而在规划层面,仙途智能采用3D规划,即基于欧式坐标系无膨胀的精细化贴边轨迹,考虑自车3D形体(扫刷、车体突出传感器等)和不同高度、材质的路边障碍物交互。在控制层面,使用车规级EHB线控制动系统和SBW双备转向系统,响应精度高。

AI安全员+平行驾驶,大模型为1vN远程运营保驾护航
仙途智能已在全球30余座城市部署了无人驾驶车辆与服务,在全无人运营状态下,保障无人车现场安全运行、突发状况的快速响应处理成为运营管理的重中之重。通过集成最新的大模型,仙途智能实现了车辆与云端平台之间的高效数据交互与智能决策协同。依托云端的强大算力进行场景理解与策略优化,显著提高了无人驾驶系统在长尾场景中的决策准确度,为远程运营提供安全保障。
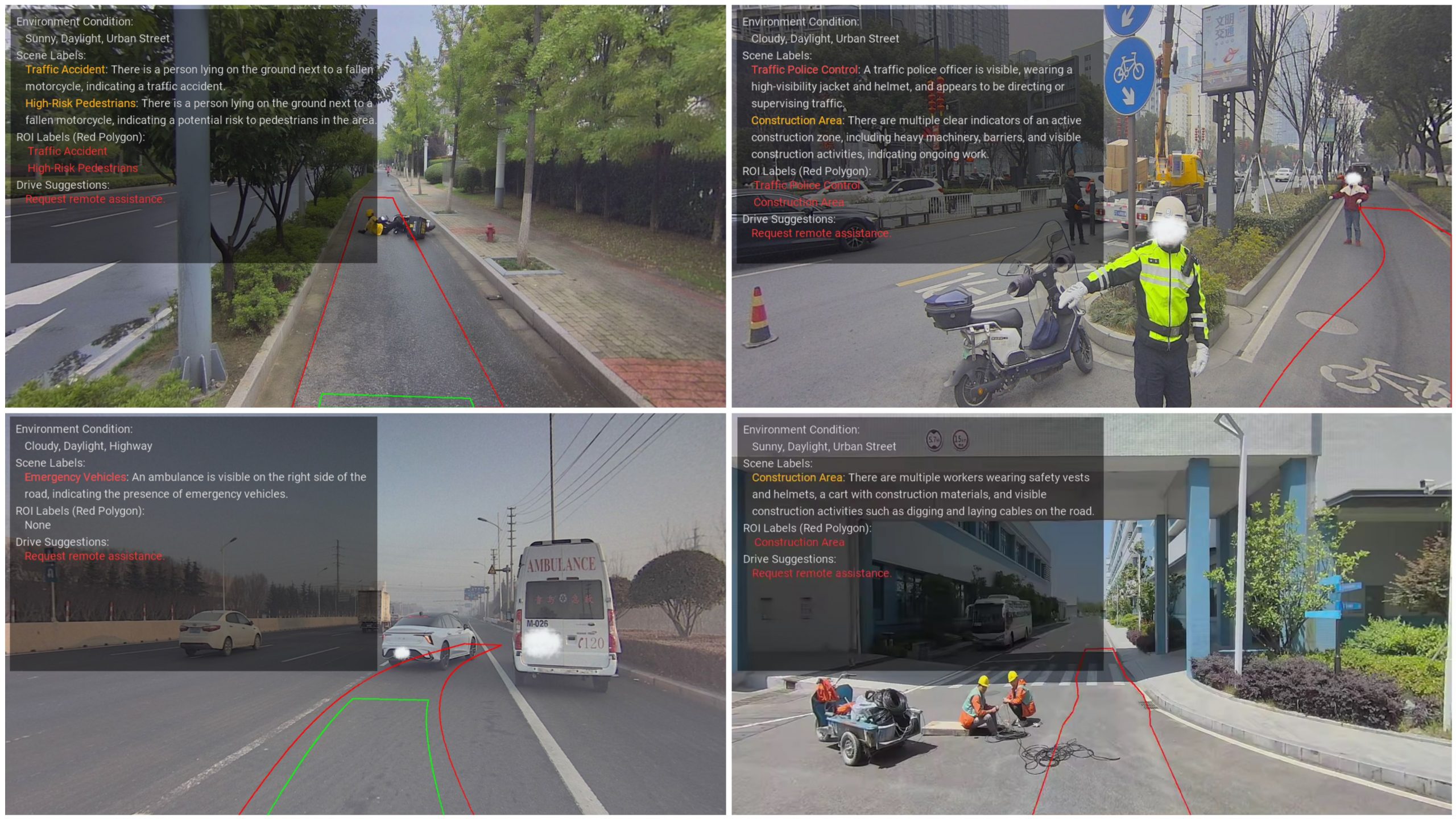
实际作业过程中,AI安全员给出场景理解和行驶建议
在不增加车端计算负载的情况下,车云协同方案需要解决无人驾驶领域中的疑难、复杂、高危场景识别与决策痛点,基于云端大模型的AI 安全员应运而生。通过多模态大模型,仙途智能研发团队从海量的运营数据中持续挖掘高危场景,已实现路面坑洼、临时施工区域、穿行孩童等长尾场景的高效识别。基于历史接管数据与闭环仿真数据,研发团队利用大模型标注与人工对齐,构建了决策规划异常数据集。
在长尾场景、异常场景数据集基础上训练的 AI 安全员在运营过程中持续关注车辆运行状态,识别长尾场景,推理危险行为,检测异常决策,在必要时通知人类远程安全员及时接入。远程安全员接入后,可通过车辆前、后、环视角和感知检测结果判断周围环境,对车辆驾驶决策进行协助指导,即便在弱网环境下也可依靠单车智能实现协助效果。在一些极端复杂的场景中,远程安全员可以通过高速、低延迟的通信网络直接控制车辆,实现平行驾驶。远程安全员可以通过高清视频流和实时传感器数据获取车辆周围环境的全面信息,并使用专门的远程驾驶座舱精确操控车辆,实现远程实时驾驶,提供了在极端复杂和紧急情况下额外的安全保障。
AI安全员和平行驾驶极大提升了远程安全员的工作效率,使得1vN体系的远程运营成为可能。目前,仙途智能已实现一位远程安全员管理5-10台无人驾驶车辆。随着数据和模型的丰富完善,N还将不断扩大。
从开发到部署,高效破解“因地制宜”难题
与面向大众试乘体验的Robotaxi不同,商用无人驾驶车辆需要将完善的服务和产品交付给客户,还会面临更多来自特殊场景和客户的“定制化”需求。仙途智能凭借强大的研发积累和运营经验一一破解,广受市场赞誉。
在美国马萨诸塞州的大型工业园区内,道路呈非结构化、无车道线,路侧常有大型货车动态停放。园区要求无人清扫设备能完成常规贴边任务的同时,还能实时规划路径,灵活清扫动态空置场地。仙途智能采用深度学习算法,提取BEV视角的感知特征以学习路沿的几何参数表示,通过数据驱动实现端对端的路沿感知;同时结合地图数据先验知识,提升植被遮挡、无明显路沿结构等corner case下的鲁棒性。针对动态清扫需求,仙途智能基于实时建图结果,判定车辆和货物等障碍物的停放情况,动态调整待清扫区域,采用启发式搜索的全局规划算法生成合理的清扫顺序和路径;对于一些临停的大型车辆,在路径规划算法中引入多种代价函数和启发函数,提升了绕障脱困场景的效率和鲁棒性。车辆的无人驾驶能力和作业能力获得了客户的一致认可。
针对中东地区极端炎热天气和扬沙气候,仙途智能研发团队模拟当地50-65℃工况环境,针对三电系统、液压系统、清扫系统、车身底盘结构、内外饰、低压电器和自动驾驶系统进行了全方位测试和调校,解决了车辆在极端气候环境下的运行难题。

目前,仙途智能已经在全球30+城市商业化落地,得益于各地服务体系快速完善,仙途智能交付运营团队能够快速完成项目部署和交付。仙途智能按照大区划分,在全国部署了多个交付运营团队,同时在海外重点地区也筹建了交付团队。仅2024年,仙途智能已高效完成130+项目部署,平均3个工作日完成高精度地图制作-现场部署-客户验收的完整交付流程,最快当天完成高精度地图制作,1个工作日内完成现场部署+客户验收,较业界平均部署交付时间提升近50%。此外,仙途智能研发中心给予7*24小时技术支持,快速响应,保障不同时区的车辆均能在整备后快速稳定完成交付,从容应对客户的持续服务需求。






Autowise V3、Autowise V1在多地商业化运营
在无人驾驶商业落地的过程中,仙途智能不断夯实自身技术实力,吸纳融汇人工智能领域前沿技术,推动无人驾驶产业技术迭代,为无人驾驶商业化落地提供全方位的技术支撑,让AI技术释放更具变革性的产业价值。







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}