
The IEEE International Conference on Robotics and Automation (ICRA2024) recently took place in Yokohama, Japan. A research paper titled “MEDL-U: Uncertainty-aware 3D Automatic Annotation based on Evidential Deep Learning” by Autowise.ai-Hong Kong University of Science and Technology Joint Laboratory was accepted at ICRA2024. This marks another instance where research work from the joint laboratory has been accepted at a top international conference, following previous acceptances at CVPR and ECCV.
Autowise.ai Founder and CEO Chao Huang stated: “Data annotation is at the core of the closed-loop process for autonomous driving data, and efficiently and economically annotating data is crucial for the pace of iteration in autonomous driving technology. The solution proposed by the joint laboratory, utilizing the Evidence Deep Learning (EDL) framework for 3D automatic annotation, holds the promise of significantly improving the efficiency of annotation work. It aims to reduce the need for costly manual annotation by leveraging automation, thus achieving cost reduction and efficiency enhancement in the commercialization process of autonomous driving technology.”

2024 IEEE ICRA official website https://2024.ieee-icra.org/
ICRA is one of the most prestigious international conferences in the fields of robotics and automation, organized by the IEEE Robotics and Automation Society. With its high-quality paper presentations, panel discussions, and other events, ICRA attracts top researchers, engineers, and industry experts from around the world each year, making it an indispensable annual event in the fields of robotics and automation.
The Autowise.ai-HKUST Joint Laboratory, co-founded by Autowise.ai and the Hong Kong University of Science and Technology, is led by Professor Tong Zhang, an internationally renowned scholar in machine learning. The laboratory aims to leverage the strengths of both parties to drive industrialization and innovative applications of artificial intelligence technology in the field of autonomous driving. Its relevant research work has been accepted by top artificial intelligence conferences such as CVPR and ECCV.

Paper address: https://arxiv.org/pdf/2309.09599
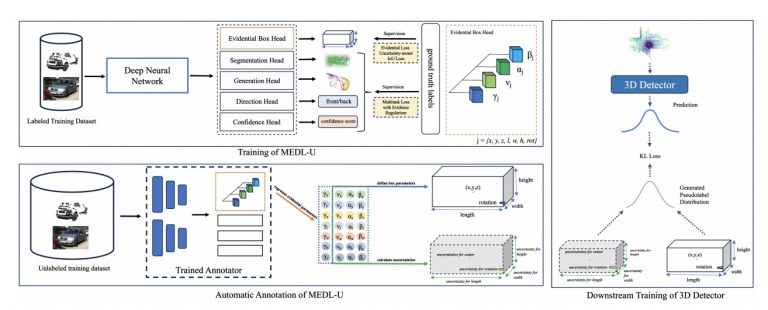
The paper “MEDL-U: Uncertainty-aware 3D Automatic Annotation based on Evidential Deep Learning,” published by the joint laboratory, focuses on data annotation in obstacle detection tasks. In autonomous driving, 3D obstacle detection methods rely on a large amount of manually annotated data, which is not only inefficient but also costly. To reduce dependence on manual annotation, researchers propose a weakly supervised framework to automatically generate pseudo-labels for unlabeled data. However, the automatically generated pseudo-labels contain noise and are less accurate than manually annotated labels. Therefore, the paper proposes to use the Evidence Deep Learning (EDL) framework to generate pseudo-labels while quantifying the uncertainty of each parameter of the 3D bounding box to improve the performance and reliability of pseudo-labels in practical applications. However, directly applying EDL to 3D detection faces challenges such as relatively low quality of pseudo-labels, excessively high uncertainty estimation, and a lack of effective explanation and utilization of uncertainty. To overcome these issues, researchers have introduced an Uncertainty-aware Intersection over Union (IoU) loss function, an Evidence-aware multi-task loss function, and a post-processing stage to refine uncertainty estimation. Through a series of experiments, MEDL-U has demonstrated its effectiveness on the KITTI dataset. Compared to existing 3D automatic annotators, MEDL-U achieved better performance on all difficulty levels in the validation set and state-of-the-art results on the official test set.
Industry-academia-research collaboration is a key path to drive innovative research results into commercial scenarios. Autowise.ai is continuously strengthening its technical research in the field of autonomous driving, actively exploring the output of scientific research results, collaboratively promoting the technological iteration of autonomous driving, and provides comprehensive technical support for the commercialization of autonomous driving, enabling AI technology to unleash more transformative industrial value.







