深度学习一词源于对人工神经网络的研究,为了让计算机通过不断学习从而解决这些问题,学术界试图模仿人脑中由上百亿神经元组成的神经网络,提出了用于计算机的名为“神经网络”的学习策略。

图片来源:DeepLearning.AI深度学习专业,神经网络与深度学习课程
如图,这里是一个简单的有四个输入值的神经网络,最左边的x是输入层,中间的小圆圈是隐藏神经元,其中的每一个神经元都将所有的四个特征当作输入值,神经网络将会自己来决定中间的网络节点是什么,并最终生成输出值y。对于神经网络最重要的一点就是,只要给定足够多的训练示例(x,y),神经网络就可以很好地拟合出一个函数,来建立x和y之间的映射关系。
随着大数据时代的到来,深度学习已广泛应用于日常生活的各个领域,如语音图像识别、人脸信息的检测。Autowise.ai的自动驾驶清扫车也在深度学习技术的加持下,不断实现功能的迭代。目标检测就是深度学习方法的经典应用之一,它可以从图片中识别出感兴趣的物体,并确定类别和位置。目前基于深度学习的做法可以笼统分为两类:先找可能出现物体的区域,后判断物体类别的Two-Stage方法,以及一步到位提取区域和物体的One-Stage方法。属于前者的R-CNN, Fast-RCNN在算法排行榜上叱咤一时;后者的YOLO, SSD, RetinaNet也为业界所喜闻乐见。与常规的识别人、动物的运用不同,在杜伊斯堡项目中,Autowise.ai将这一技术运用到了全新的场景中,实现了对口罩这一特殊垃圾的精准识别,成为无接触式的防疫清扫作业中的“火眼金睛”。

Autowise.ai自动驾驶清扫车对口罩进行识别
自动驾驶清扫车作业的挑战还来自于道路上变道的车辆、横穿的行人等交通参与者。因此,快速准确地预测车辆行人的意图和未来的轨迹,也是自动驾驶系统至关重要的能力。深度学习在这一问题上同样逐渐成为了主流解法。LSTM结构、图神经网络都是算法探索的方向。
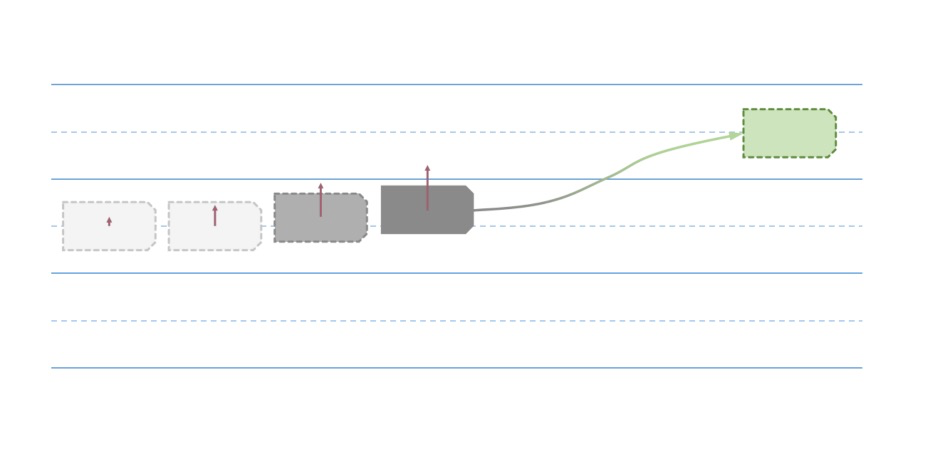
通过车辆当前几秒的路线,Autowise.ai训练了具有长短期记忆(LSTM)结构的神经网络结构充当预测的大脑。如下图所示:障碍车辆在前几次观测中,车辆向左的横向速度变大,位置逐渐向左偏离当前车道的中心线。深度学习模型判断其意图为向左变道,计算出目标位置,并生成对应的轨迹。

应用深度学习判断车辆变道
在城市公开道路上进行清扫作业,除了垃圾、车辆和行人,自动驾驶清扫车还面临着特殊障碍物和天气的挑战,大到铁板、石墩、废弃铁轨,小到纸张、落叶、粉尘和水雾,Autowise.ai的工程师们采用深度学习的解决方案,将这些变量x逐个击破。未来,Autowise.ai仍将持续探索前沿人工智能技术在自动驾驶中的应用,提供更加安全、高效的自动驾驶智能环卫解决方案。
参考文献
[1]DeepLearning.AI:神经网络与深度学习
https://www.deeplearningai.net/classroom/Neural_Networks_and_DeepLearning
[2]https://viso.ai/deep-learning/object-detection/
[3]Liu, L., Ouyang, W., Wang, X. et al. Deep Learning for Generic Object Detection: A Survey. Int J Comput Vis 128, 261-318 (2020). https://doi.org/10.1007/s11263-019-01247-4;
[4]https://tech.meituan.com/2019/10/31/trajectory-prediction-contest.html
[5]Liang, Ming and Yang, Bin and Hu, Rui and Chen, Yun and Liao, Renjie and Feng, Song and Urtasun, Raquel,Learning lane graph representations for motion forecasting.ECCV 2020







